- Горячие темы:
- Все для фронта - все про оружие и технику
Робот и дрон смогли объединиться ради исследования мира
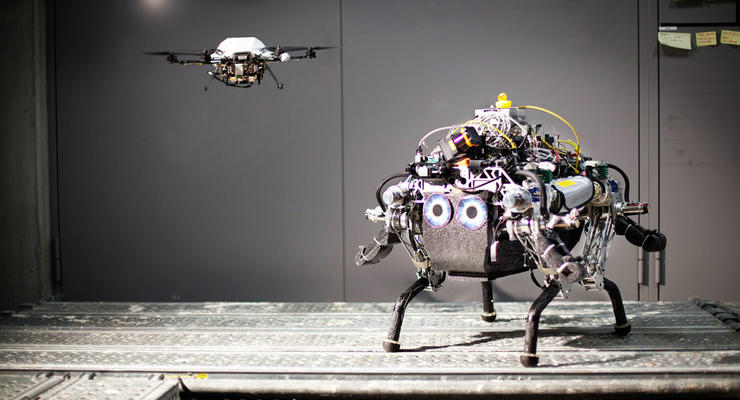
Китайские инженеры создали алгоритм, позволяющий дрону и наземному роботу совместно создавать карту окружающей среды и избегать препятствий в ней. Эксперименты показали, что такой метод позволяет исследовать среду быстрее, чем это делают те же аппараты поодиночке, рассказывают авторы статьи, которая будет представлена на конференции ISER 2018.
Читай также: Дроны научились видеть сквозь стены
Инженеры под руководством Шаоцзе Шэня (Shaojie Shen) из Гонконгского университета науки и технологии решили объединить аппараты разных типов в единую систему, работающую более эффективно, чем те же аппараты поодиночке. В отличие от другихинженеров, Шэнь и коллеги решили использовать дрон в качестве полноценного, а не резервного источника данных.
Разработчики создали алгоритм, который постоянно строит карту местности и наносит на нее объекты. При этом между исследованной и неисследованной областями образуется граница. Планировщик пути для роботов устроен таким образом, что он постоянно обновляет траекторию и посылает робота к наиболее длинному участку границы, таким образом поощряя исследование наибольших неизученных областей.
Читай также: В воздухе, в воде и на земле: Военные создают настоящего трансформера
Инженеры самостоятельно создали четырехколесного робота с лидаром и квадрокоптер с направленной вниз стереокамерой для создания карты местности. Во время передвижения робот и дрон в реальном времени создают единую карту местности с нанесенными на нее препятствиями. Благодаря этому каждый из них может не тратить время на исследование области, если данные о ней уже собрал другой аппарат.
Инженеры провели два типа экспериментов — в реальной комнате размером 17 на 8 метров, а также виртуальном пространстве размером 20 на 20 метров. Во время экспериментов аппараты работали вместе или поодиночке. Результаты экспериментов показали, что во всех типах сред (виртуальной и реальной) кооперация аппаратов двух типов позволяет им составить полную карту помещения быстрее, чем при самостоятельной работе.
Напомним, ранее сообщалось, что группа инженеров из США и Швейцарии создала пару небольших дронов, которые благодаря совместной работе научились выполнять достаточно сложные задачи. В одном из продемонстрированных экспериментов дроны смогли самостоятельно открыть большую дверь с нажимаемой ручкой.















